M5Stack BALA2 Fire Self-balancing Robot Kit
Product Link
Description
BALA2Fire is short for 'Balance', as its name suggests, it is the second generation of M5Stack balancing robot series. BALA2Fire is a Self Balancing Robot consisting of M5Stack Fire and two wheels(DC motors).The base uses STM32F030C8T6 as the main control and has a two-way encoding motor driver and built-in 1200mAh battery.
This robotics product comes with preloaded software. A self-balancing robot application which balances the robot vertically using a closed-loop algorithm. You can program it to automatically move around through programming, or you can combine Wi-Fi to develop remote control functions.
This Robot is controllable by a Smartphone device or a Transmitter. The BALA2 base contains a wealth of interfaces. In addition to the conventional PortB and PortC, it also supports 8-channel servos, of which 4 channels can be directly connected, and the remaining 4 channels need to be connected from the inside of the base. Even if you have never attempted such a balancing robot program, you can quickly get the hang of it and control it through UIFlow. The self balancing robot uses data from the Accelerometer and Gyroscope to correct its orientation and position.The 2 DC driver module communicates with M5Stack Fire through I2C(0x3A).
Caution: While using PSRAM, you cannot use PortC
Features
6-DOF IMU
Two-wheel drive, PID control balance
Grove extension ports
8-channel servo drive, 4-channel external connection, 4-channel built-in
Support Wi-Fi programmable
Built-in speaker
TF Card Support
LEGO™ Compatible
Programming Support
Python
UIFlow (Blockly)
Arduino
Applications
Balancing car
Specifications
ESP32
240MHz Dual Core,600 DMIPS,520KB SRAM,Wi-Fi
Flash
16MB Flash
PSRAM
8MB PSRAM
LCD
2.0 inch, 320x240 Color TFT LCD, ILI9342C
Speaker
1W-0928
MEMS
MPU6886
Motor Driver
HR8833
Base Controller
STM32F030C8T6
Ports
GROVE I2C*1/UART*1/GPIO*1/SERVO*4(+4 Extendable Channel)
Battery Capacity
1200mAh
Net Weight
153.9g
Gross Weight
260.0g
Product Size
54*54*65*mm
Package dimensions
170*110*66mm
Case Material
Plastic
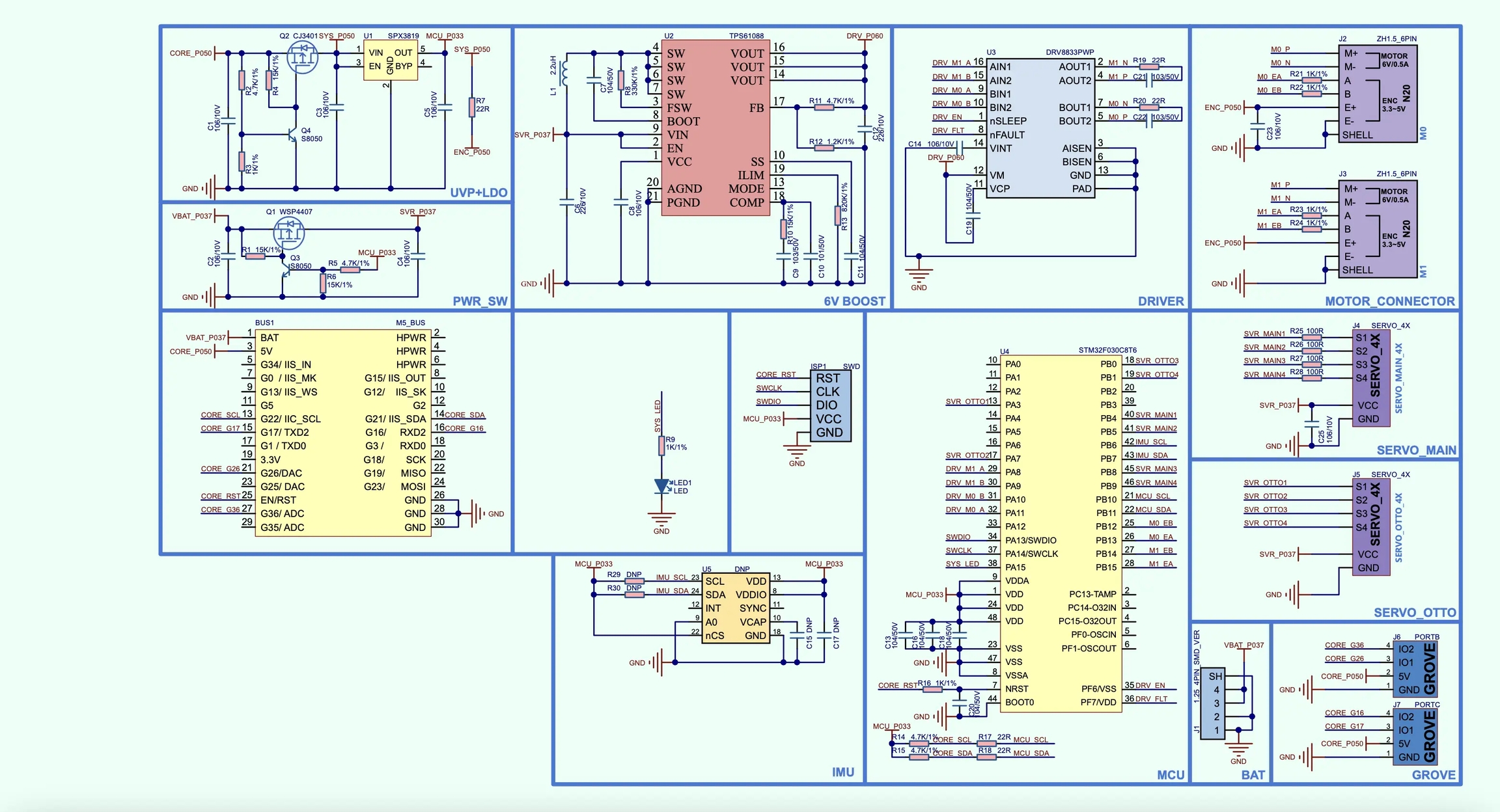
Schematics
PinMap
GROVE Port A & B & C
PORT A
SCL
SDA
PORT B
DAC
ADC
PORT C
RX
TX
Last updated
Was this helpful?